MonoDiffSplat: 3D Scene Reconstruction using 2D Gaussian Splatting and Video Diffusion Inpainting
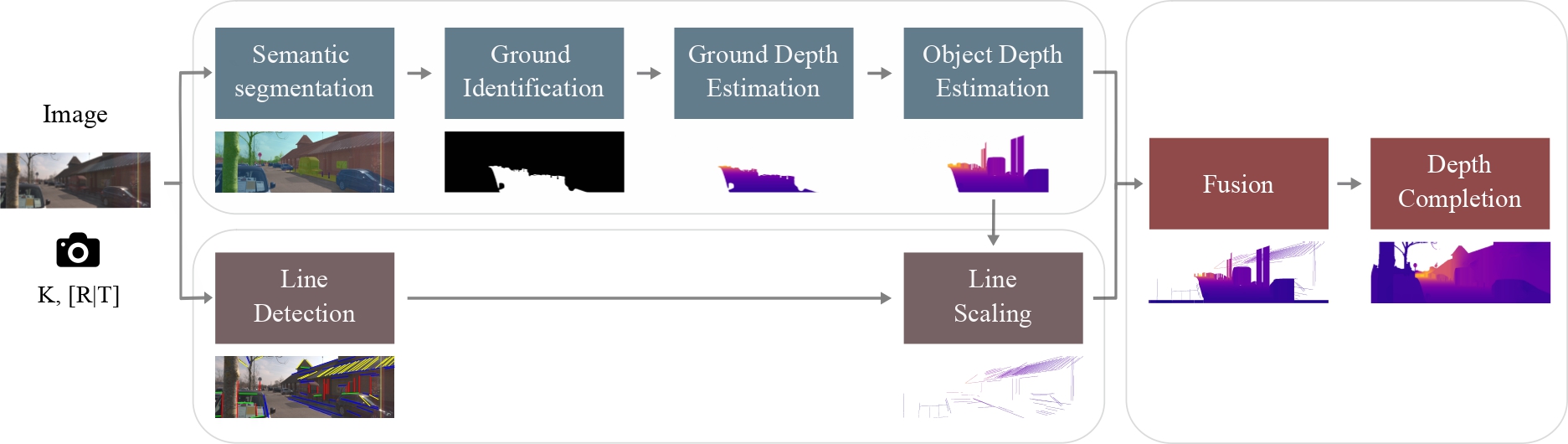
Combined Depth Anything V3 and G4Splat pipelines and introduced a parallax-inducing camera trajectory strategy for the generative inpainting stage. These trajectories force the video diffusion model to hallucinate valid depth cues and resolve disocclusions by actively moving into the scene